Manipulatorer for avfallssortering – fra robotarmer til luftdyser
Fra robotarmer til luftdyser
I tidligere artikler har vi sett på hvorfor robotisert avfallssortering lønner seg og hvordan deteksjonssystemer identifiserer ulike materialer. Denne artikkelen fokuserer på «hendene» i systemet – de ulike manipulatorene som fysisk utfører sorteringsarbeidet.
Oversikt over ulike manipulatortyper
To dominerende manipulatortyper finnes i robotisert avfallssortering:
- Industrielle robotarmer – allsidige og tilpasningsdyktige
- Luftdysesystemer – høyhastighetssortering av lettere materialer
Mange ser robotsortering som et alternativ til eksisterende optisk sortering (NIR-lesere). I virkeligheten er dette to sider av samme prosess: et optisk deteksjonssystem koblet med en manipulator.
Industrielle robotarmer
Den allsidige arbeidshesten
Industrielle robotarmer tilbyr den mest allsidige løsningen for avfallssortering:
- Leddede robotarmer – med 6 eller flere akser gir stor bevegelsesfrihet
- Deltaroboter – ekstremt raske, ideelle for lette materialer
- Kartesiske roboter – beveger seg langs tre lineære akser (X, Y, Z)
Fordeler med kommersielle robotarmer
Velprøvd og moden teknologi: Industrielle roboter har vært brukt i produksjon i tiår. Store produsenter som FANUC, ABB, KUKA og Universal Robots har levert hundretusenvis av enheter. Dette betyr:
- Teknologien er godt testet og robust
- Pålitelighet er dokumentert (ofte 100 000+ timer mellom feil)
- Minimalt vedlikeholdsbehov
Omfattende service- og støttenettverk: Etablerte robotprodusenter tilbyr globale servicenettverk, rask tilgang til reservedeler og standardiserte opplæringsprogrammer.
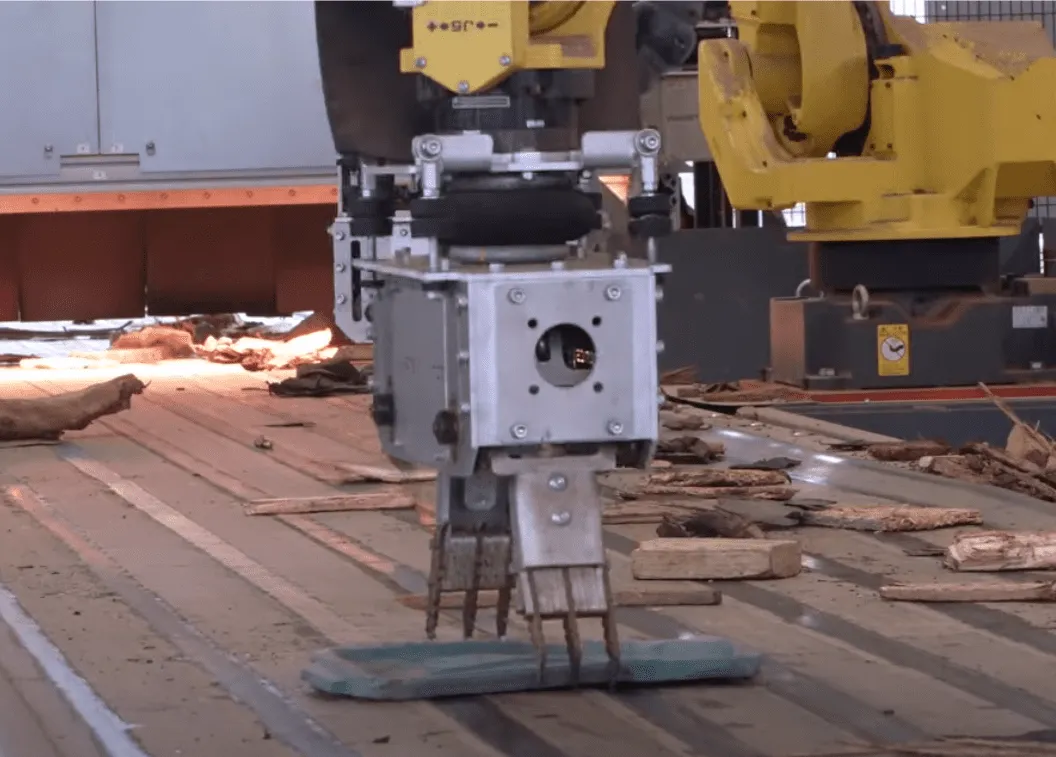
Spesialiserte gripeverktøy for avfall
Spesialiserte gripere montert på robotarmer gjør dem effektive for avfallssortering. Gripere for tøffere materialer håndterer gjenstander opptil 20 kg og passer for tre, betong og store metallgjenstander. Varianter finnes også for poser, fleksible materialer og lette gjenstander.
Avansert griperteknologi muliggjør presis plukking uten å forstyrre omliggende materialer på transportbåndet. Dette tillater flere robotarmer i serie uten mellomliggende kamerasystemer.
Andre manipulatortyper
Kartesiske roboter
Noen leverandører har utviklet egne kartesiske roboter som beveger seg langs tre vinkelrette akser. Denne mekanisk enklere strukturen kan redusere produksjonskostnader, men gir begrenset bevegelsesfrihet.
Mekaniske ejektorer
Enkle skyveenheter fungerer i posesorteringssystemer der fargede poser skilles fra hverandre. Moderne robotarmer med AI-basert deteksjon løser lignende oppgaver med mye enklere og billigere infrastruktur.
Velge riktig manipulator
Flere faktorer påvirker valget mellom robotarmer og luftdysesystemer:
- Materialstørrelse og vekt – Lette, flate materialer → luftdyser. Tunge, store gjenstander → robotarmer
- Produksjonshastighet – Svært høy hastighet → luftdyser (hundrevis per minutt). Moderat hastighet → robotarmer (20–60 plukk per minutt)
- Antall fraksjoner – To fraksjoner → luftdyser. Flere fraksjoner (opptil 6) → robotarmer
- Materialverdi og renhetskrav – Høyverdimaterialer → presise robotarmer. Bulkmaterialer → luftdyser
Kombinerte løsninger
Moderne anlegg bruker i økende grad kombinerte tilnærminger:
- Luftdyser for innledende grovsortering i to hovedfraksjoner
- Robotarmer for finsortering i flere underfraksjoner
- Ulike manipulatortyper håndterer ulike materialstrømmer samtidig
Fremtidens manipulatorer
Utviklingen går raskt. Gripere med innebygde sensorer tilpasser gripekraft og strategi basert på objektene som plukkes. Mest spennende er AI-potensialet for å trene selve manipulatoren – utvikle avanserte bevegelsesmønstre som sikrer at objekter når tiltenkt destinasjon.
Robotarmer og luftdysesystemer konkurrerer ikke direkte – de har ulike styrker. Å kombinere begge teknologiene gir ofte optimale resultater.
Usikker på hva dere trenger?
Vi hjelper dere med å finne riktig løsning – uforpliktende.